
La série XD est dotée d’une architecture électronique plus avancée et complexe que les autres séries de joysticks. Ainsi, le joystick assure une autosurveillance continue pour déceler toute défaillance interne potentielle. Cette capacité de diagnostic interne basée sur la redondance est aussi liée à la compatibilité SIL2.
En cas de défaillance, le modèle XD doit réagir rapidement dans son diagnostic et se comporter en conséquence pour informer le système de l’anomalie. Simultanément, les autres fonctions non impactées par la défaillance doivent rester opérationnelles à des fins de praticité. Dans ce cas, la temporisation et le mode de défaillance sont critiques pour garantir la sécurité de l’utilisateur. La règle consiste à transmettre le code d’erreur au bus CAN dans les 500 ms après la survenue de la défaillance. Le code d’erreur est conforme à J1939-71 comme détaillé ci-dessous.
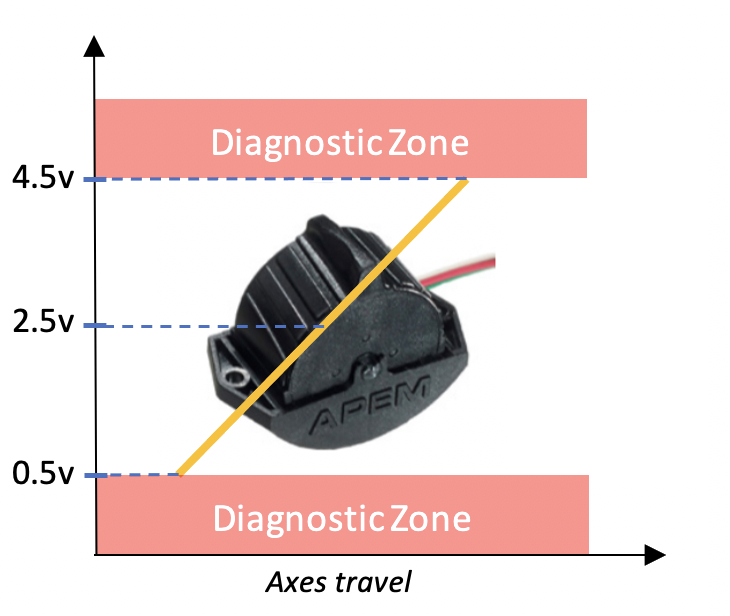
Sortie en dehors de la plage opérationnelle
Une alimentation transitoire ou manquante peut impacter la sortie du composant analogique jusqu’à déconnecter brusquement le composant de la face avant. La sortie apparaît alors directement dans la zone de diagnostic et le code d’erreur approprié est déclenché pour le composant correspondant. Avec une molette, par exemple, la valeur décimale de la sortie d’axe est 1022 et la valeur décimale du bit de position est 10.
Perte de communication entre le capteur et le contrôleur CAN. Si une perte de communication se produit entre le capteur de l’axe principal et le contrôleur CAN et que la communication n’est pas rétablie après plusieurs tentatives, un code d’erreur se déclenche sur les axes X et Y et leurs éléments redondants. Par exemple, la valeur décimale de la sortie des axes X et Y est 1022 et la valeur décimale du bit de position est 10.


Perte de communication entre la face avant et la base. Si une perte de communication se produit entre la face avant principale et le contrôleur CAN et que la communication n’est pas rétablie après plusieurs tentatives, un code d’erreur se déclenche sur tous les composants de la face avant. Par exemple, la valeur décimale de la sortie des molettes est 1022 et la valeur décimale du bit de position est 10. La valeur décimale de l’état du bouton-poussoir est 10.
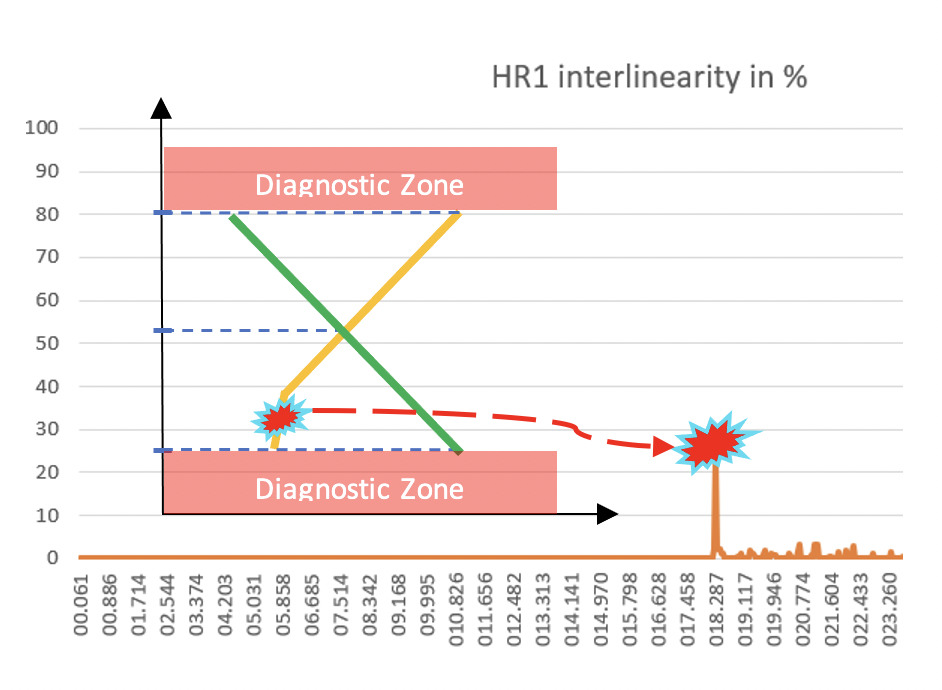
Linéarité interne en dehors des valeurs de tolérance
Par défaut, les erreurs de linéarité interne ne sont pas indiquées, mais elles peuvent être traitées par le joystick lui-même sur demande. De nombreux scénarios peuvent déclencher une linéarité interne inappropriée, comme un capteur mort, un déplacement inhabituel de l’aimant, un mécanisme cassé (cardan, roue) un débranchement électrique, une alimentation électrique transitoire…Nous recommandons un seuil de divergence minimal de 12 % entre l’axe principal et l’axe redondant. Une part donnée de détection consécutive de divergences (ou délai d’exécution) doit être incluse au préalable pour éviter toute détection défectueuse potentielle, par exemple due à un mouvement rapide. Pour la molette en face avant, par exemple, la valeur décimale de l’axe principal et de l’axe redondant est 1022 et la valeur décimale du bit de position est 10.
DEMANDER UN ECHANTILLON

Critères pour la conception de l’IHM d’une machine mobile?

Comment choisir les options de sorties de votre interrupteur?
